Winter School on Autonomous Systems 2026, Bari, Italy
January 19–23, 2026, Bari, Italy
The Winter School in Autonomous Systems will bring together PhD students and early-stage researchers interested in the theory and applications of autonomous and intelligent systems.
The School will offer a dense program of lectures delivered by leading researchers, covering key scientific themes in autonomous systems, including control, robotics, learning, and decision-making.
{kind=link}
{kind=link}
Costs and Fees
Registration for the Winter School DauSy 2026 includes:
- access to all lectures, seminars, and discussion sessions
- conference materials and credentials
- coffee breaks, lunch, and aperitif on all event days
- participation in the social event
- access to the Politecnico di Bari facilities used for the school.
Information regarding registration fees for external participants will be shared soon.
Thanks to the support of the Italian National Recovery and Resilience Plan (Piano Nazionale di Ripresa e Resilienza, NRRP), free registration is guaranteed for all DAUSY PhD students enrolled in the 38th cycle with PNRR scholarships. For all the other DAUSY PhD students the registration fee is reduced.
How to Apply
Applications to the Winter School DauSy 2026 must be submitted through the official registration form.
Program
The detailed program of the Winter School is provided below. The program is provisional and will be updated as additional information becomes available.
Afternoon I (14:00-15:40)
Michele Cucuzzella
University of Groningen, Groningen, the Netherlands
Coffee break (15:40-16:10)
Afternoon II (16:10-17:50)
Michele Cucuzzella
University of Groningen, Groningen, the Netherlands
Break (17:50-18:10)
Networking (18:15-19:00)
Aperitif (19:00)
Morning I (08:50-10:30)
Nicanor Quijano
Universidad de los Andes, Bogotá, Colombia
Coffee break (10:30-11:00)
Morning II (11:00-12:40)
Nicanor Quijano
Universidad de los Andes, Bogotá, Colombia
Lunch (12:40-14:00)
Afternoon I (14:00-15:40)
Jan Jantzen
University of the Aegean, Chios, Greece
Coffee break (15:40-16:10)
Afternoon II (16:10-17:50)
Jan Jantzen
University of the Aegean, Chios, Greece
Break (17:50-18:10)
Networking (18:15-19:00)
Aperitif (19:00)
Morning I (08:50-10:30)
Umberto Montanaro
University of Surrey, Surrey, England
Coffee break (10:30-11:00)
Morning II (11:00-12:40)
Umberto Montanaro
University of Surrey, Surrey, England
Lunch (12:40-14:00)
Afternoon I (14:00-15:40)
Carlos Ocampo-Martinez
Universitat Politècnica de Catalunya, BarcelonaTech (UPC), Barcelona, Spain
Coffee break (15:40-16:10)
Afternoon II (16:10-17:50)
Carlos Ocampo-Martinez
Universitat Politècnica de Catalunya, BarcelonaTech (UPC), Barcelona, Spain
Break (17:50-18:10)
Networking (18:15-19:00)
Social event (19:00)
Morning I (08:50-10:30)
Bruno Siciliano
Università di Napoli Federico II, Napoli, Italy
Coffee break (10:30-11:00)
Morning II (11:00-12:40)
Bruno Siciliano
Università di Napoli Federico II, Napoli, Italy
Lunch (12:40-14:00)
Afternoon I (14:00-15:40)
Stefania Santini
University of Naples Federico II, Italy
Coffee break (15:40-16:10)
Afternoon II (16:10-17:00)
Birgit Vogel-Heuser
Technical University of Munich, Munich, Germany
Break (17:50-18:10)
Afternoon III (18:10-19:00)
Birgit Vogel-Heuser
Technical University of Munich, Munich, Germany
Aperitif (19:00)
Lecturers

Success factors for machine intelligence in factory automation
Birgit Vogel-Heuser, Technical University of Munich, Munich, Germany
The research interests of Prof. Vogel-Heuser (*1961) are in the area of systems and software engineering as well as in the modeling of distributed and reliable embedded systems. Especially, her research foci are put on the challenges that result from the increasing demand to produce customer-specific products in the plant manufacturing domain. Engineering and education on hybrid processes and heterogeneous distributed and intelligent systems using a human centered approach are also included in her research area.
Birgit Vogel-Heuser received her Dipl. Ing. degree in electrical engineering in 1987 and her Dr.-Ing. degree in mechanical engineering in 1990 from the RWTH Aachen, Germany. Over ten years, she acquired industrial experience in industrial automation. After different professorship positions, she was appointed to the Chair of Automation and Information Systems at the Technical University Munich in 2009. Her research is focussing on evolvable field-level automation and appropriate architectures for manufacturing and logistics systems. She is a Fellow of the IEEE, IEEE RAS Distinguished Lecturer, Co-Chair of IEEE RAS TC Digital Manufacturing and Human-Centered Automation and a member of the National Academy of Science and Engineering in Germany (acatech). She has held the Order of Merit of the Federal Republic of Germany since 2024.
To develop AI-based operator assistance system in industrial production several obstacles need to be adressed like sparse data of low quality, limited computation power and lack of appropriate documentation. The talk will introduce partial solutions to adress the challenges mentioned like a modeling notation, a metric for data completeness, the combination of expert knowledge and data mining as well as successful use cases.

Robotics for Interaction Technology: Scenarios and Challenges
Bruno Siciliano, Università di Napoli Federico II, Napoli, Italy
Bruno Siciliano is professor of robotics and control at the University of Naples Federico II. He is also Honorary Professor at the University of Óbuda where he holds the Kálmán Chair. His research interests include manipulation and control, human–robot cooperation, and service robotics. Fellow of the scientific societies IEEE, ASME, IFAC, AAIA, AIIA, NAAI, he received numerous international prizes and awards, including the recent 2024 IEEE Robotics and Automation Pioneer Award. He was President of the IEEE Robotics and Automation Society from 2008 to 2009. He has delivered more than 150 keynotes and has published more than 350 papers and 24 books. His book “Robotics” is among the most adopted academic texts worldwide, while his edited volume “Springer Handbook of Robotics” received the highest recognition for scientific publishing: the 2008 PROSE Award for Excellence in Physical Sciences & Mathematics. His team has received more than 30 million Euro funding in the last 18 years from competitive European research projects, including two ERC grants. “Keep the gradient” is the motto that Siciliano invented, meaning a constant search for new ideas and new solutions. A hymn to complexity to capture challenges and opportunities always in the name of the art of work & play, as stated in his passionate TEDx Talk. More details are available at http://wpage.unina.it/sicilian/.
Robotics research has advanced in the last two decades through an intensive collaboration with other disciplines and research communities. Multi-disciplinary approaches are more successful in addressing the combined issues of cognition (perception, awareness and mental models), and physical attributes (safety, dependability and dexterity) in the world of robotics. Previously separated from humans, the new advanced robots (or cobots) are sharing our workspace and collaborating with us. Increasingly sophisticated built-in sensors enable them to see and feel the presence of humans and avoid accidental contact. The perception of robotics technology is improving, as we experience more ways it can positively affect our lives. In particular, the social and medical benefits of robots are starting to get more attention. In this scenario, the terms artificial intelligence (AI) and robotics are liberally used, and frequently interchanged today. However, the physical nature of a robotic system distinguishes it from the pure abstraction of AI. We are experiencing a transition from Information and Communication Technology (ICT) to InterAction Technology (IAT). After a comprehensive introduction on the above issues, the lecture addresses the robot manipulation and control aspects of IAT and is organized in four parts. In the first part, control techniques for dynamic nonprehensile manipulation are presented. The second part of the lecture focuses on how to merge learning and model-based strategies to provide autonomy to robot manipulation. In the third part, several aerial robotics techniques for inspection and maintenance are surveyed. The fourth part of the lecture deals with recent advances on shared control with special emphasis on surgical robotics. Different application scenarios are presented and open challenges are discussed.

Non-Centralized Economic Dispatch of Networked Microgrids using Predictive Control
Carlos Ocampo-Martinez, Universitat Politècnica de Catalunya, BarcelonaTech (UPC), Barcelona, Spain
Carlos Ocampo-Martínez (Senior Member, IEEE) received the M.Sc. degree in Industrial Automation from the Universidad Nacional de Colombia – Sede Manizales in 2003 and the Ph.D. degree in Control Engineering from the Universitat Politècnica de Catalunya – BarcelonaTech (UPC), Barcelona, Spain, in 2007. He joined UPC as an Assistant Professor in 2011, where is currently a Full Professor of Automatic Control and Model Predictive Control at the Automatic Control Department (ESAII–UPC).
Prof. Ocampo-Martínez has authored and co-authored more than 300 scientific publications in high-impact journals and conference proceedings in the fields of automatic control and dynamic systems. He has also authored, co-authored, and co-edited six books on water, energy, and control engineering published by Springer. He has held visiting research positions at the Massachusetts Institute of Technology (MIT), Cambridge, MA, USA; Delft University of Technology, Delft, The Netherlands; the University of Cambridge, Cambridge, U.K.; the University of Siena, Siena, Italy; and the Instituto Tecnológico de Buenos Aires (ITBA), Buenos Aires, Argentina.
His research interests include constrained model predictive control, management and control of large-scale systems (with emphasis on partitioning and non-centralized control), process control, game-theoretic control approaches, and industrial applications, particularly in water and energy systems, as well as smart manufacturing under the IIoT framework. He currently serves as Associate Editor for the IEEE Transactions on Control of Network Systems, the IEEE Open Journal of Control Systems, the IEEE Control Systems Letters (L-CSS), and the Journal of Process Control.
This keynote presents a non-centralized model predictive control (MPC) framework for the economic dispatch of electrical networks, aimed at enabling scalable and structurally flexible energy management in interconnected microgrids. The proposed approach is built upon a two-stage scheme that combines event-triggered network repartitioning with coalition-based coordination. In the first stage, the electrical network is dynamically decomposed into a fixed number of non-overlapping microgrids through an event-triggered repartitioning mechanism, with the objective of achieving self-sufficient operation, whereby local loads are supplied by local generation resources. Recognizing that self-sufficiency cannot always be ensured, the second stage introduces a coalition formation mechanism among neighboring microgrids that are unable to operate independently. This process leads to a decomposition of the global economic dispatch problem into coalition-based subproblems, each guaranteed to be feasible. While the resulting solution is suboptimal with respect to a fully centralized formulation, it remains feasible and offers a favorable trade-off between performance, scalability, and computational tractability. The keynote concludes with representative numerical studies that illustrate the effectiveness of the proposed methodology and highlight its potential for real-world large-scale energy systems and networked microgrid applications. In addition, ongoing research efforts are focused on extending the proposed framework to explicitly account for uncertainties in demand and renewable energy generation, as well as on the development of alternative solution approaches grounded in game-theoretical methods, dissipativity-based control, and generalized Nash equilibrium seeking for the solution of the associated distributed optimization problems.

Control of global warming
Jan Jantzen, University of the Aegean, Chios, Greece
Dr. Jan Jantzen has experience in automatic control, software systems, and renewable energy implementation. He served as an Assistant and Associate Professor of Automatic Control at the Technical University of Denmark (DTU) before becoming an Engineer at the Samso Energy Academy in 2008, where he contributes to sustainable energy projects. He is also an Adjunct Professor at the University of the Aegean, Chios island, Greece, and the author of ‘Foundations of Fuzzy Control’.
Denmark’s renewable energy island, Samso; climate gas action plan; Earth’s energy balance; CO2 growth rate; the effects of CO2 and albedo; a linearized global warming model; the effect of control actions; open question: the effect of ice-albedo feedback?
Learning objectives
– to understand how world-wide decisions are made based on computer simulations
– to evaluate policies against global warming

Krasovskii Passivity Based Control and Consensus
Michele Cucuzzella, University of Groningen, Groningen, the Netherlands
Michele Cucuzzella received the M.Sc. degree in Electrical Engineering and the Ph.D. degree in Systems and Control from the University of Pavia (UP), Italy, in 2014 and 2018, respectively. From 2017 until 2020, he was a postdoc at the University of Groningen (UG), the Netherlands. He then joined the UP as assistant professor and moved in 2024 to the UG as associate professor at the Engineering and Technology institute Groningen. He is also the Twin Transition coordinator at the Jantina Tammes and Wubbo Ockels Schools of the UG and visiting associate professor at the Hiroshima University, Japan. His research activities are mainly in the area of nonlinear control with application to the energy domain and smart complex systems. He has co-authored the book Advanced and Optimization Based Sliding Mode Control: Theory and Applications, SIAM, 2019. He serves as Associate Editor for the European Journal of Control and is member of the EUCA and IEEE CSS Technology Conferences Editorial Boards. He received the Certificate of Outstanding Service as Reviewer of the IEEE Control Systems Letters 2019. He also received the 2020 IEEE Transactions on Control Systems Technology Outstanding Paper Award, the IEEE Italy Section Award for the best Ph.D. thesis on new technological challenges in energy and industry, and the SIDRA Award for the best Ph.D. thesis in the field of systems and control engineering.
In this talk a new passivity concept named Krasovskii passivity will be introduced and novel Krasovskii passivity based control techniques will be presented, including consensus protocols. The usefulness of the proposed methodologies is demonstrated through the design of controllers for power networks. Their performance and robustness are validated both through detailed simulations and experimental results, highlighting the practical relevance of Krasovskii passivity–based control.

From Strategic Games to Evolutionary Population Dynamics: Game-Theoretic Tools for Autonomous Systems
Nicanor Quijano, Universidad de los Andes, Bogotá, Colombia
Nicanor Quijano (IEEE Senior Member) received his B.S. degree in Electronics Engineering from Pontificia Universidad Javeriana (PUJ), Bogotá, Colombia, in 1999. He received the M.S. and PhD degrees in Electrical and Computer Engineering from The Ohio State University, in 2002 and 2006, respectively. In 2007, he joined the Electrical and Electronics Engineering Department, Universidad de los Andes (UAndes), Bogotá, Colombia where he is currently a Full Professor and the director of the research group in control and automation systems (GIAP, UAndes). He has been a member of the Board of Governors of the IEEE Control Systems Society (CSS) for the 2014 period, an associate editor for the IEEE Transactions on Control Systems Technology (2018-2023), the Journal of Modern Power Systems and Clean Energy (2016-2018), and Energy Systems (2018-2021), and he was the chair of the IEEE CSS, Colombia for the 2011-2013 period. He has published more than 100 scientific papers (journal papers, international conference papers, book chapters), he has co-advised the best European PhD thesis in the control systems area in 2017 and 2025, and he is the co-author of the best paper of the ISA Transactions, 2018. In 2021, he obtained the Experienced Research Award from the School of Engineering, UAndes, and in 2025 he won the Alain Gauthier Award from the IEEE Control Systems Society Colombia. Currently his research interests include hierarchical and distributed network optimization methods for control using learning, bio-inspired, and game-theoretical techniques for dynamic resource allocation problems, especially those in energy, water, agriculture, and transportation.
Large-scale systems (LSS) operate in environments where many decision-making agents interact, compete, and cooperate over shared resources. Game theory provides a natural language for modeling these interactions, while dynamical systems and evolutionary perspectives explain how collective behaviors emerge over time. This workshop will offer an introduction to these ideas, moving from classical game-theoretic foundations to evolutionary and population-based models that are particularly relevant for LSS. In the first part, we will review the essentials of noncooperative game theory: normal-form games, best-response mappings, Nash equilibrium, and basic existence results. The second part will focus on evolutionary and population games, where the central object is not a single equilibrium profile but the dynamics of strategy distributions in large populations. We will discuss standard evolutionary dynamics (e.g., replicator dynamics), their interpretation as dynamical systems, and tools for assessing stability and convergence. Throughout, we will connect these models to applications in autonomous and cyber-physical-social systems, including examples from energy and infrastructure networks, resource-sharing problems, and large-scale coordination. The goal of the workshop is twofold: to equip participants with a coherent conceptual pathway from static games to evolutionary population dynamics, and to illustrate how these tools can be used to analyze and design dynamical systems.

Control of Multi-Agent Systems with time delays: theory and applications
Stefania Santini, University of Naples Federico II, Italy
Stefania Santini is Professor of Systems and Control Engineering (Automatica) at University of Naples Federico II (Italy), where she has been a Member of the Academic Senate from 2013 to 2021. She leads the Distributed Automation Systems Lab, a research group in the field of distributed automation and its applications. Her research interests include nonlinear control of nonlinear and cyber-physical systems, time-delayed systems, networked control and multi-agent systems, with applications to automotive engineering, transportation technologies, and more recently to the application domains of smart manufacturing, information technology and energy. She is Senior Editor of IEEE Transactions on Intelligent Transportation Systems (IEE T-ITS) and Associate Editor of IEEE Transactions on Control Systems Technology (IEEE T-CST) and IEEE Transaction on Aerospace and Electronic Systems (IEEE T-AES).
During the last years, the rapid development of communication technologies has brought considerable attention to the control of Multi-Agent Systems (MASs) and Networked Control Systems (NCS), due to their broad applications in a wide range of real-world engineering applications, such the cooperative driving of autonomous connected vehicles and the distributed smart grid control, among the others. In cooperative control of multi-agent systems, one of the important problems is to design an appropriate distributed control protocol which, operating on local information and the ones exchanged among neighboring agents via communication networks, let the group to reach a consensus or agreement on certain quantities of interest, hence performing tasks that they could not alone by themselves. However, the insertion of a shared communication network in feedback control loops makes the analysis and the design of distributed controllers more sophisticated and can lead to the onset of several issues to face. These latter are denoted as communication constraints induced by the communication network and may involve network-induced delays, data packet dropouts, quantization errors, time-varying network topologies and network channel fading. In this perspective, this talk aims at exploring how to design novel cooperative control solutions able to face communication constraints challenges in a resilient and robust way.

Enhanced Model Reference Adaptive Control: Theory, Extensions, and Engineering Applications
Umberto Montanaro, University of Surrey, Surrey, England
Umberto Montanaro received the M.Sc. degree in Computer Science Engineering, the Ph.D. degree in Control Engineering, and the Ph.D. degree in Mechanical Engineering from the University of Naples Federico II, Naples, Italy, in 2005, 2009, and 2016, respectively. From February 2010 to January 2013, he was a Research Fellow at the Italian National Research Council (CNR), Istituto Motori. He is currently a Senior Lecturer in Control Engineering and Autonomous Systems at the University of Surrey, Guildford, U.K. He is the Founder and Director of the Surrey Team for the Control of Smart Multi-Agent Systems Operating Autonomously and Synergistically (Su-COSMOS). His research interests include control theory and its applications to mechatronics, automotive systems, and the coordination of networked autonomous systems.
Model Reference Adaptive Control (MRAC) represents a foundational paradigm in adaptive control, enabling systems with uncertain dynamics to achieve prescribed performance by tracking a desired reference model. The objective of this lecture is to present enhanced MRAC solutions and their applicability to engineering control problems. The lecture also provides an overview of MRAC problem formulation and control architectures, along with the key analytical tools used to establish closed-loop stability and their role in deriving adaptive laws that guarantee boundedness and convergence properties. The lecture then explores novel extensions, including enhanced MRAC formulations, closed-loop reference model approaches for output-feedback MRAC schemes, and adaptations tailored to classes of discontinuous systems. The design of MRAC methods for representative engineering applications is presented. Case studies include adaptive control of automotive components, path tracking for autonomous ground vehicles, and control of quadrotor systems. Through these examples, the practical benefits and implementation considerations of enhanced MRAC techniques are assessed, providing participants with both theoretical insight and applied perspectives relevant to research and practice in adaptive control.
Venue
The winter school will take place at Politecnico di Bari, the Technical University of Bari, located in Bari, Italy, at via E. Orabona 4, 70125.
Established in 1990, Politecnico di Bari stands as the most recently founded Polytechnic University in Italy. It is characterized by a strong emphasis on technology and science, playing a crucial role in shaping the intellectual landscape of aspiring architects, engineers, and industrial designers.
A map of Bari with the location of the school is provided below.

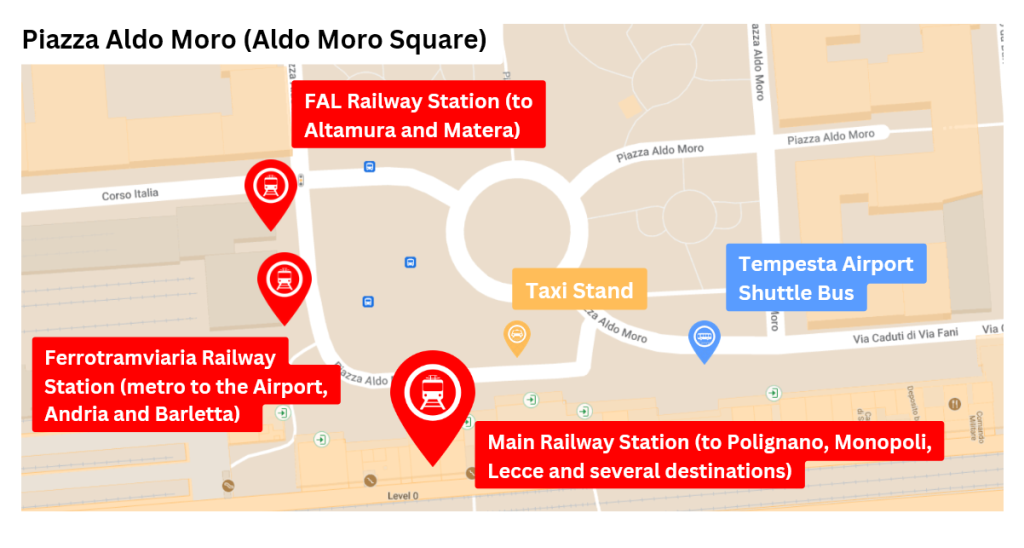
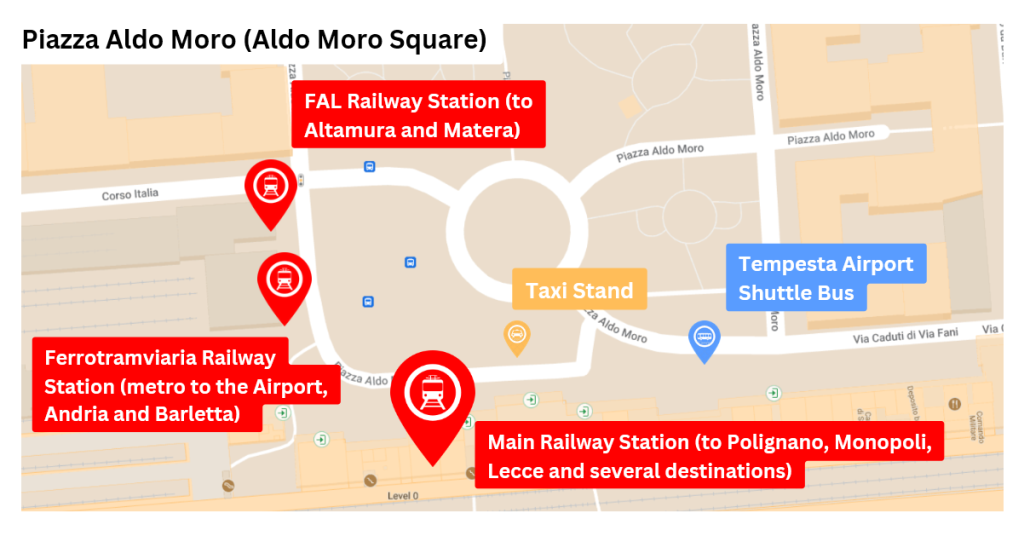
Getting Around Bari
Bari is a compact and welcoming city, easy to explore on foot or using its urban transport options. Walking is generally safe and pleasant, but please stay alert when crossing roads—even at pedestrian crossings.
The AMTAB urban transport network is the most convenient option for reaching Bari’s key locations and most charming areas, including the Politecnico. Several bus lines connect the Main Railway Station (Piazza Aldo Moro) to the Politecnico di Bari and other city destinations.
- Ticket prices: Approx. €1 at authorized retailers; €1.50 if purchased directly on board.
- Timetables and stops: Visit the AMTAB website or use the MUVT app (also available in English for iOS and Android) to check real-time schedules, create itineraries, and buy tickets directly from your smartphone.
- Travel tip: Google Maps also provides reliable directions and public transport info in Bari.
Taxis are readily available throughout the city. We recommend downloading the itTaxi app for convenient bookings. For additional information, visit www.taxibari.it.
Bari is embracing eco-sustainable mobility, offering a variety of shared transportation services:
Bike Sharing – VAIMOO
For a sustainable and active way to get around, use the VAIMOO app (iOS/Android) to find available bikes and enjoy Bari at your own pace.
Electric Kick Scooters
Easily rentable through dedicated mobile apps, scooters can be located on an interactive map showing availability and battery level. Simply scan the QR code to unlock. The system is free-flow, allowing one-way trips with flexible drop-off.
Providers: Lime, Tier, Bit, Telepass
Rates: ~€1 to unlock, €0.15–€0.22/min to ride, €0.05/min when paused.
Piky Electric Microcars and Scooters
Compact, colorful, and fully electric, Piky vehicles are ideal for urban mobility. Download the PikyRent Urban Mobility App (iOS/Android) to locate and rent vehicles.
Accomodation
Several hotels and B&Bs are available, and we recommend using platforms such as Airbnb or Booking.com to explore options. Please note that we have no formal agreements with these independent providers.
Most hotels are within walking distance, while others are easily accessible by public transportation. To determine the distance between these hotels and the conference venue, use the official Bari Public Transportation travel planner at https://www.mycicero.it/muvt/TPWebPortal/en
Travel Information
All participants must ensure that they have obtained a visa that may be required to visit Italy before travelling.
Please contact your travel agent and/or the Italian Consulate/Embassy in your country for the latest information on the Italy visa issue as soon as possible. Visa processing time may vary. You are advised to make a visa application at your earliest convenience if it is needed. You should allow approximately 12 weeks before the event, although this process may take longer in some countries. Information on visa requirements can be found at https://vistoperitalia.esteri.it/home/en, where a simple form will guide you through a series of steps based on your country of origin. When asked “Reasons for your stay?”, choose “Study” and follow the instructions.
The school venue is located in Bari, which can be easily reached from the International Airport of Bari (BRIIATA), also called Aeroporto Karol Wojtyła. It is located in the north-western part of the city of Bari. Bari Airport is modern and well-organized, and it offers trains, buses, and taxi services for connections with other localities. Carriers include ITA Airways, Lufthansa, Eurowings, Ryanair, and Wizzair.
For travelers arriving from Europe, we recommend considering not only direct flights to Bari but also exploring the option of arriving at the following two airports, which are in close proximity to Bari and can be conveniently reached by train or bus in a short amount of time.
- Flight to Brindisi (BDSIATA): There, you can take a direct bus shuttle to reach the Main Railway Station of Bari (i.e., Bari Centrale). Alternatively you can reach tre Brindisi main train station (Brindisi Centrale) and then take a train to Bari.
- Flight to Naples (NAPIATA): From Naples, you can opt for a direct bus or train to reach Bari Central Station.
For those arriving from outside Europe, we recommend considering a connecting flight through one of these airports, followed by a flight connection to Bari.
- Flight to Roma Fiumicino (FCOIATA): There, you can take a direct flight to Bari Airport (BRIIATA).
- Flight to Milano Malpensa (MXPIATA): There, you can take a direct flight to Bari Airport (BRIIATA).
Bari is also connected by high-speed trains from/to Rome, Milan, Turin, Bologna and Florence. Check the Trenitalia and Italo websites for timetables and prices.
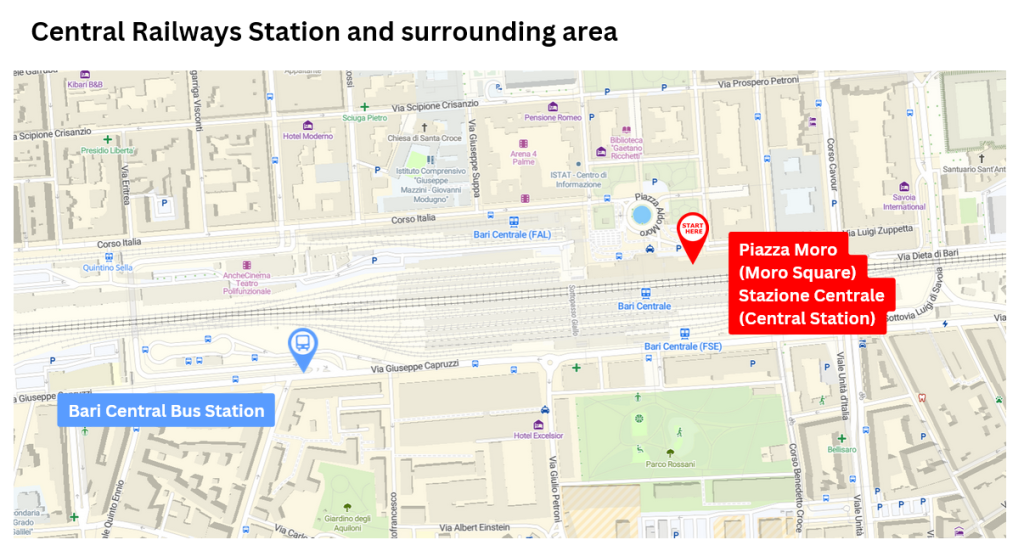
Bari is extensively connected to various cities in Italy, including Naples, Brindisi, and Rome, through a well-developed network of coach services. For convenient and efficient travel, consider checking companies’ offerings, such as FlixBus, Itabus, Marozzi, and Marino. Normally, coaches stop for Bari is at the central bus station on Via Giuseppe Capruzzi.
Bari is the destination for ferries arriving from the Greek ports of Patras and Igoumenitsa. If you are traveling on a Eurorail during the low season, the cost is €16, and during the mid-season, €31. A normal ticket to Igoumenitsa is about €29 on the deck and in low season. There are also ships to Bar and Kotor (Montenegro), Dubrovnik (Croatia), and to Durrës and Vlora (Albania). Ferry operators are either Superfast Ferries, Blue Star Ferries, or Jadrolinija. An up-to-date site with international ferry schedules is here.
Tourism
The Apulia region (or Puglia, as it is known to the locals) is an important economic center in Southern Italy that forms the heel of the Italian boot and is located in the Southern Adriatic Sea.
In recent years Puglia has gradually built a reputation as a bridge between West and East, that mirrors an increasingly multi-cultural, open, tolerant and friendly community, connecting people, individuals and businesses, from different countries and cultures.
The capital city of Puglia is Bari, a modern city that keeps strong ties with its own traditions. Bari has a maritime flavor and deserves a glance for the panoramic seafront promenade.



The origins of Bari are very old, but not well established. Items dating to the Bronze Age have been found in the oldest part of the town; however, most of historians agree that the town was founded between 1600 and 1100 B.C. by Illyrians, coming from the Balcanian peninsula, on the opposite side of the Adriatic Sea. The name probably derives from that of Barione, the leader of one of these Illyrian groups.
The first reliable information on Bari dates back to the 4th century B.C. when it went under Roman rule. In the following centuries, it had a special relation with Rome and Tito Livio underlined its strategic importance.
After the fall of the Roman Empire, Bari was involved in the war between the Goths, and late the Longobards, against the Byzantines.
In the 9th century, after many raids, the Arabs succeeded the Longobards and settled in Bari for about 30 years, setting up an emirate. It lasted until 871 when the army of Ludovico II brought back the city under the Byzantine rule, which on the contrary, did not meet the people’s favour.
In 1071, the city was conquered by the Normans, led by Roberto il Guiscardo, and became part of the dukedom of Apulia and Calabria.
This was the beginning of an important period in the history of Bari. In 1087, St. Nicholas’ holy remains were taken away from Myra (Turkey) by a group of sailors and brought to Bari, where the building of a dedicated Basilica was decided and started immediately. In 1089, the remains were led by Pope Urbano II in the yet-to-be-built crypt of the Basilica (the whole Basilica was completed after about 100 years).
Later on, Bari and all the dukedom of Apulia and Calabria fell under the domination of the Norman King of Sicily, whose dynasty shortly came to an end and was replaced by the Hohenstaufen Swabians; this was the period in which Frederick II (later on crowned also Emperor of Germany) reigned. He loved Apulia (he was called “puer Apuliae”) and built or restored many castles in the region, among which the Bari castle and the famous and mysterious Castel del Monte (on the top of a hill, about 50 km from Bari).
Angevin and Aragon rulers followed for about three centuries. Toward the end of this period, in the 16th century, two women had an important role in history: Isabel of Aragon, widow of the Duke of Milan Gian Galeazzo Sforza, who enlarged the castle, making it her private residence, and Bona Sforza, Queen of Poland, who established strong links between Bari and the Kraków court.
After Bona Sforza’s death, Bari was again included in the kingdom of Naples, ruled by a Spanish viceroy, and that was a long period of decay for the Apulian city and the south of Italy as well.
At the beginning of the 19th century, the French came, led by Napoleon Bonaparte, and his brother-in-law Jacques Murat, became King of Naples. Under Murat, Bari started to grow, shortly becoming the most important city of the region. In 1808, Murat decreed the building of the new part of the city, a modern district which, after him, was (and still is) called “Murattiano”.
At the end of the French rule, the Bourbons came back and reigned until the unification of Italy in 1860. Bari is now the first city and administrative capital of the Apulia region, with about 350,000 inhabitants.
Nature around in Puglia is magnificent. The white high cliffs of Mattinata and Vieste, the long sandy beaches with crystalline water … the grottoes of Castellana Grotte, the second European biggest canyon of the Gravina di Laterza, the bauxite querry in Otranto, the beautiful little towns on the sea like Polignano and Monopoli, …of Gallipoli,…
… the little cities surrounded by acres of olive groves like Martina Franca, the white city of Ostuni, and many other special places make the Apulia region an incredible land to be discovered step by step.


The region’s cuisine is based on typical products found within the surrounding region of Apulia: wheat, olive oil, seafood, and wine. Local flour is used in homemade bread and pasta production, including, most notably, the famous orecchiette ear-shaped pasta.
Homemade dough and olive oils are also used to bake fried panzerotti with mozzarella, and focaccia alla barese with tomatoes. Perhaps Bari’s most famous dish is the oven-baked Patate, riso e cozze (potatoes with rice and mussels). The whole Apulian region has a range of wines, including the classical Primitivo, Castel del Monte, Muscat, and most notably the recently emerging rosé wines.
The capital city of Puglia is Bari, a modern city that keeps strong ties with its own traditions. Bari has a maritime flavor and deserves a glance at the panoramic seafront promenade.

